Elektromotory – typy, zařízení, princip činnosti, parametry, výrobci
Elektrický motor, zkráceně elektromotor, je elektrický stroj, s jehož pomocí se elektrická energie přeměňuje na mechanickou energii k pohonu různých mechanismů. Elektromotor je hlavním prvkem elektrického pohonu.
V některých provozních režimech elektrického pohonu elektromotor provádí zpětnou přeměnu energie, to znamená, že pracuje v elektrický generátor.
Podle typu vytvářeného mechanického pohybu mohou být elektromotory rotační, lineární atd. Elektromotorem se nejčastěji rozumí rotační elektromotor, protože se mu dostalo největšího uplatnění.
Oblast vědy a techniky, která studuje elektrické stroje, je elektromechanika. Všeobecně se má za to, že jeho historie začíná v roce 1821, kdy byl vytvořen první elektromotor M. Faradaye.
Konstrukce elektromotoru
Hlavní součásti rotačního elektromotoru jsou stator a rotor. Stator – stacionární část, rotor – otočná část.
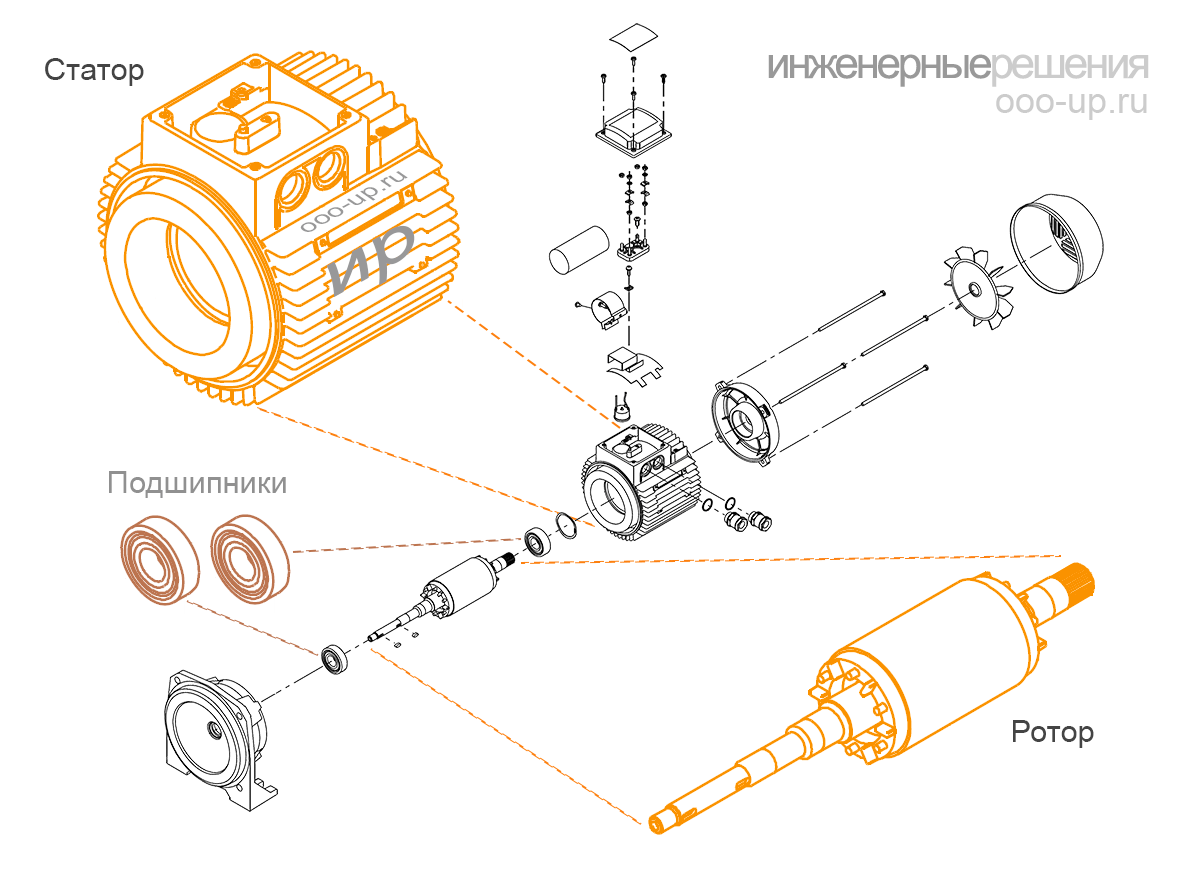
Standardní provedení rotačního motoru
U většiny elektromotorů je rotor umístěn uvnitř statoru. Elektromotory, ve kterých je rotor umístěn mimo stator, se nazývají elektromotory invertního typu.
Princip činnosti elektromotoru
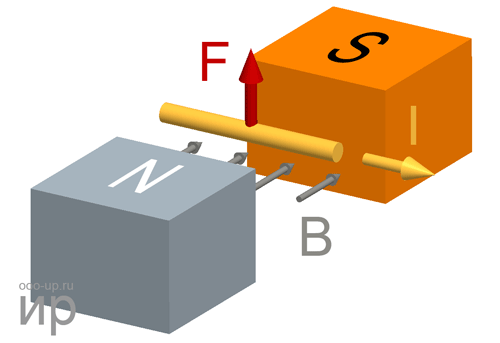
1. Podle Ampérova zákona bude vodič s proudem I v magnetickém poli ovlivněn o vynutit F.
2. Pokud je vodič s proudem I ohnut do rámu a umístěn do magnetického pole, pak na dvě strany rámu, umístěné v pravém úhlu k magnetickému poli, budou působit opačně směřující síly F
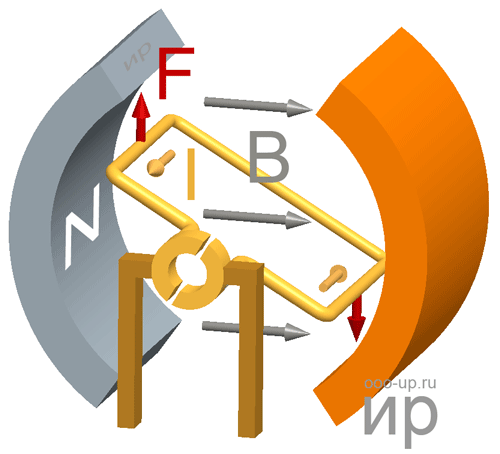
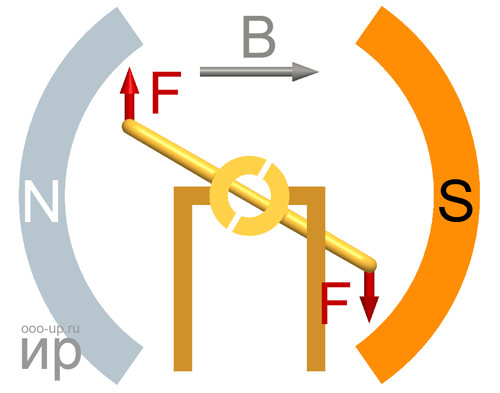
3. Síly působící na rám vytvářejí krouticí moment nebo moment síly, který jej otáčí.
4. Vyrobené elektromotory mají vícenásobné otáčky na kotvě pro zajištění většího konstantního točivého momentu.
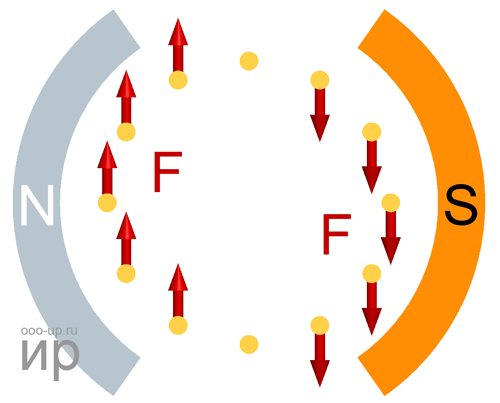
5. Magnetické pole mohou vytvářet jak magnety, tak elektromagnety. Elektromagnet se obvykle skládá z drátu navinutého kolem jádra. Podle zákona elektromagnetické indukce tedy proud tekoucí do rámů indukuje proud do vinutí elektromagnetu, který zase vytvoří magnetické pole.
- Podrobný popis principu činnosti elektromotorů různých typů:
- Princip činnosti jednofázového asynchronního elektromotoru
- Princip činnosti třífázového asynchronního elektromotoru
- Princip činnosti synchronního elektromotoru
Klasifikace elektromotorů
- Univerzální
- Odpor
- DCDC s budicím vinutím
- Zapínání vinutí
- Nezávislý
- Sekvenční buzení
- Paralelní
- Kombinované
- BDPT
(Brushless motor + EP | + DPR) - WFD
(Proudový motor s rotorem s vyčnívajícími póly a soustředěným statorovým vinutím + ED |+ DPR)
- Třífázový
(vícefázové)- ADKR
- ADFR
- se startovacím vinutím
- se stíněnými sloupy
- s asymetrickým magnetickým jádrem
- SDOV
(se sběracími kroužky a kartáči) —> - SDPM 5 —>
- SDPMW
- SDPMP
- Hybridní
- Tato kategorie nepředstavuje samostatnou třídu elektromotorů, protože zařízení zařazená do uvažované kategorie (BDDC, VRM) jsou kombinací bezkomutátorového motoru, elektrického měniče (invertoru) a v některých případech i snímače polohy rotoru. . U těchto zařízení je elektrický měnič pro svou malou složitost a malé rozměry obvykle integrován do elektromotoru.
- Ventilový motor lze definovat jako elektromotor, který má snímač polohy rotoru, který řídí polovodičový měnič, který provádí koordinovanou komutaci vinutí kotvy [5].
- Stejnosměrný ventilový motor je stejnosměrný elektromotor, jehož spínacím zařízením ventilu je invertor řízený buď polohou rotoru, nebo fází napětí na vinutí kotvy, nebo polohou magnetického pole [1].
- Elektromotory používané v BLDC a VRD jsou střídavé motory a díky přítomnosti elektrického měniče v těchto zařízeních jsou připojeny ke stejnosměrné síti.
- Krokový motor není samostatnou třídou motorů. Konstrukčně se jedná o PMSM, SRD nebo hybridní SRD-PM.
- CMDC – komutátorový stejnosměrný motor
- BLDC – bezkomutátorový DC motor
- EP – elektrický měnič
- DPR – snímač polohy rotoru
- VRD – spínaný reluktanční motor
- ADKR – asynchronní motor s rotorem nakrátko
- ADFR – asynchronní motor s vinutým rotorem
- SDOV – synchronní motor s budícím vinutím
- PMSM – synchronní motor s permanentními magnety
- SPMSM – synchronní motor s povrchovými permanentními magnety
- PMSD – synchronní motor s vestavěnými permanentními magnety
- SRD – synchronní reluktanční motor
- PM – permanentní magnety
- CP – frekvenční měnič
Typy elektromotorů
Komutátorové motory
Komutátorový stroj je točivý elektrický stroj, ve kterém je alespoň jedno z vinutí zapojených do procesu hlavní přeměny energie připojeno ke kolektoru [1]. V komutátorovém motoru slouží sestava kartáč-komutátor jako snímač polohy rotoru a proudový spínač ve vinutí.

Univerzální elektromotor
Může pracovat na střídavý a stejnosměrný proud. Široce se používá v ručním elektrickém nářadí a některých domácích spotřebičích (vysavače, pračky atd.). V USA a Evropě se používal jako trakční elektromotor. Rozšířil se díky svým malým rozměrům, relativně nízké ceně a snadnému ovládání.
Stejnosměrný kartáčovaný motor
Elektrický stroj, který přeměňuje stejnosměrnou elektrickou energii na mechanickou energii. Výhody stejnosměrného elektromotoru jsou: vysoký rozběhový moment, otáčky, možnost plynule řídit rychlost otáčení, jednoduchost konstrukce a ovládání. Nevýhodou motoru je nutnost údržby jednotek komutátor-kartáč a omezená životnost vlivem opotřebení komutátoru.
Bezkomutátorové motory
Bezkomutátorové motory mohou mít sběrací kroužky s kartáči, takže není třeba zaměňovat bezkomutátorové a bezkomutátorové motory.
Bezkomutátorový stroj je točivý elektrický stroj, ve kterém jsou všechna elektrická spojení vinutí zapojených do hlavního procesu přeměny energie prováděna bez posuvných elektrických kontaktů [1].
Asynchronní motor
Nejběžnější elektromotor v průmyslu. Výhody elektromotoru jsou: jednoduchost konstrukce, spolehlivost, nízká cena, dlouhá životnost, vysoký rozběhový moment a přetížitelnost. Nevýhodou asynchronního elektromotoru je obtížná regulace rychlosti otáčení.
Synchronní elektromotor
Synchronní motory se obvykle používají v aplikacích, kde je vyžadováno přesné řízení rychlosti otáčení nebo kde je vyžadována maximální hodnota parametrů, jako je výkon/výtlak, účinnost atd.
- S polním vinutím
- S permanentními magnety
- Reaktivní
- Hystereze
- Reaktivní hystereze
- Stepper
Speciální elektromotory
Servomotor
Servomotory nejsou samostatnou třídou motorů. Jako servomotor lze použít stejnosměrné a střídavé elektromotory se snímačem polohy rotoru. Servomotor se používá jako součást servo mechanismu pro přesné ovládání úhlové polohy, rychlosti a zrychlení pohonu. K provozu vyžaduje servomotor poměrně složitý řídicí systém, který je obvykle navržen přímo pro servopohon.
Základní parametry elektromotoru
- Točivý moment motoru
- Výkon elektromotoru
- Koeficient výkonu
- Jmenovitá rychlost
- Moment setrvačnosti rotoru
- Jmenovité napětí
- Elektrická časová konstanta
- Mechanické vlastnosti
Točivý moment motoru
Točivý moment (synonyma: kroutící moment, kroutící moment, moment síly) je vektorová fyzikální veličina rovna součinu poloměru vektoru taženého od osy otáčení k místu působení síly a vektoru této síly.

- kde M je točivý moment, Nm,
- F – síla, N,
- r – vektor poloměru, m
FAQ: Jmenovitý točivý moment Mnom, Nm, určeno vzorcem
- kde Pnom – jmenovitý výkon motoru, W,
- nnom — jmenovité otáčky, min -1 [4]
Počáteční rozběhový moment je moment elektromotoru při rozběhu.
FAQ: V anglickém systému měr je síla měřena v uncové síle (oz, ozf, unce-force) nebo librové síle (lb, lbf, pound-force)
1 unce = 1/16 lb = 0,2780139 N (N)
1 lb = 4,448222 N (N)točivý moment se měří v uncích na palec (oz∙in) nebo v librách na palec (lb∙in)
1 oz∙in = 0,007062 Nm (Nm)
1 lb∙in = 0,112985 Nm (Nm)Výkon elektromotoru
Výkon motoru je užitečný mechanický výkon na hřídeli motoru.
Mechanická síla
Výkon je fyzikální veličina, která ukazuje, kolik práce vykoná mechanismus za jednotku času.

- kde P je výkon, W,
- A – práce, J,
- t-čas, s
Práce je skalární fyzikální veličina rovna součinu průmětu síly do směru F a dráhy s, kterou urazí místo působení síly [2].

- kde s – vzdálenost, m
Pro rotační pohyb


- kde je úhel, rad,


- kde je úhlová rychlost, rad/s,
Tímto způsobem můžete vypočítat hodnotu mechanického výkonu na hřídeli rotačního elektromotoru

FAQ: Jmenovitá hodnota je výrobcem stanovená hodnota parametru elektrického výrobku (přístroje), se kterou má pracovat, což je výchozí hodnota pro výpočet odchylek.
Účinnost elektromotoru
Účinnost elektromotoru je charakteristická pro účinnost stroje při přeměně elektrické energie na mechanickou energii.


- kde je účinnost elektromotoru,
- P1 — dodávaný výkon (elektrický), W,
- P2 — užitečný výkon (mechanický), W
- V tomto případě, ztráty v elektromotorech kvůli:
- elektrické ztráty – ve formě tepla v důsledku ohřevu vodičů s proudem;
- magnetické ztráty – ztráty v důsledku převrácení magnetizace jádra: ztráty v důsledku vířivých proudů, hystereze a magnetických následků;
- mechanické ztráty – ztráty třením v ložiskách, ventilaci, kartáčích (pokud existují);
- dodatečné ztráty – ztráty způsobené vyššími harmonickými magnetických polí vznikající v důsledku převodové struktury statoru, rotoru a přítomnosti vyšších harmonických magnetomotorické síly vinutí.
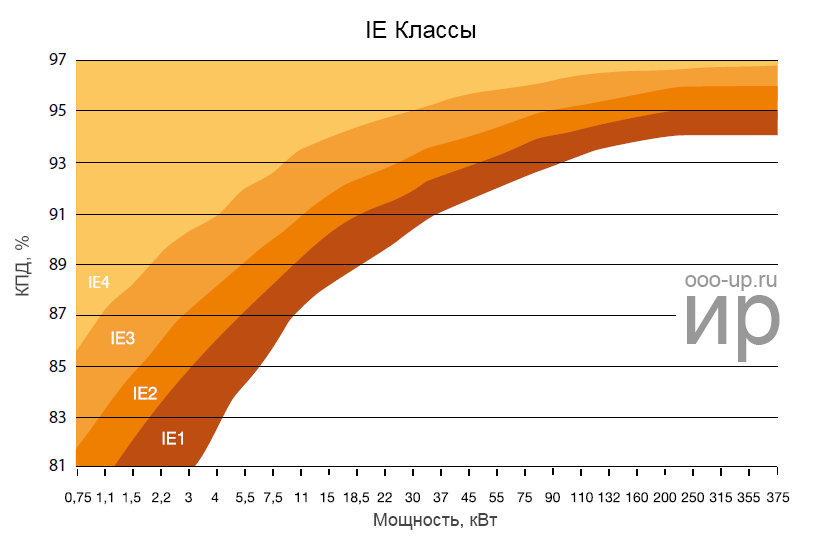
Účinnost elektromotoru se může lišit od 10 do 99 % v závislosti na typu a konstrukci.
Mezinárodní elektrotechnická komise definuje požadavky na účinnost elektromotorů. Podle normy IEC 60034-31:2010 jsou pro synchronní a asynchronní motory definovány čtyři třídy účinnosti: IE1, IE2, IE3 a IE4.
Frekvence otáčení

- kde n je rychlost otáčení elektromotoru, ot./min
Moment setrvačnosti rotoru
Moment setrvačnosti je skalární fyzikální veličina, která je mírou setrvačnosti tělesa v rotačním pohybu kolem osy, která se rovná součtu součinů hmotností hmotných bodů druhých mocnin jejich vzdáleností od osy.
- kde J je moment setrvačnosti, kg∙m 2,
- m – hmotnost, kg
FAQ: V anglickém systému měření se moment setrvačnosti měří v palcích unce-síla (oz∙in∙s 2)
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (kg∙m 2)
Moment setrvačnosti souvisí s momentem síly následujícím vztahem


- kde je úhlové zrychlení, s -2 [2]

FAQ: Stanovení momentu setrvačnosti rotující části elektromotoru je popsáno v GOST 11828-86
Jmenovité napětí
Jmenovité napětí je napětí, pro které je síť nebo zařízení navrženo a ke kterému se vztahují jejich provozní vlastnosti [3].
Elektrická časová konstanta
Elektrická časová konstanta je čas, počítaný od okamžiku přivedení stejnosměrného napětí na elektromotor, během kterého proud dosáhne úrovně 63,21 % (1-1/e) své konečné hodnoty.


- kde je časová konstanta, s
Mechanické vlastnosti
Mechanická charakteristika motoru je graficky vyjádřená závislost otáček hřídele na elektromagnetickém momentu při konstantním napájecím napětí.
Porovnání charakteristik externě komutovaných elektromotorů
Níže jsou uvedeny srovnávací charakteristiky externě komutovaných elektromotorů z pohledu aplikace jako trakční motory ve vozidlech.
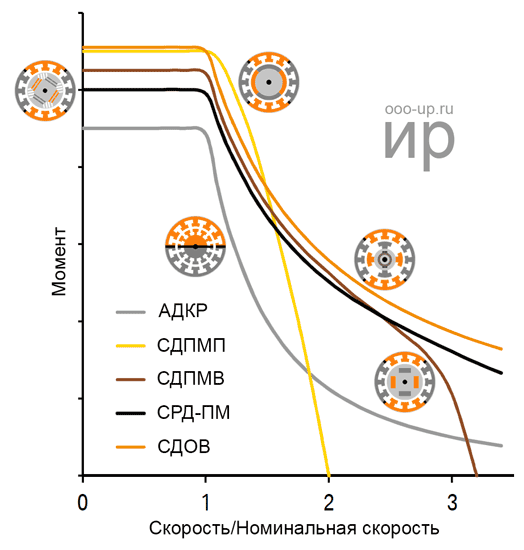
Porovnání mechanických charakteristik elektromotorů různých typů s omezeným statorovým proudem
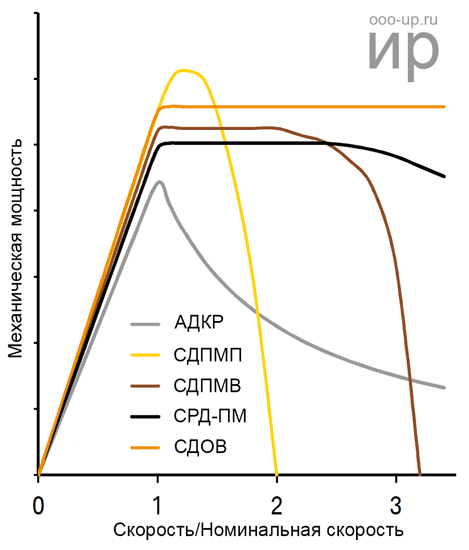
Závislost výkonu na rychlosti otáčení hřídele pro různé typy motorů s omezeným statorovým proudem
Bohužel používáte zastaralý prohlížeč. Aktualizujte svůj prohlížeč, abyste zlepšili výkon, kvalitu zobrazovaného materiálu a zlepšili zabezpečení.
Elektromotor (nebo zkráceně elektromotor) přeměňuje proudovou energii na mechanický pohyb. Princip činnosti zařízení je založen na magnetismu, který určuje přítomnost magnetů (permanentních, elektromagnetů, materiálů s magnetickými vlastnostmi) v konstrukci.
Typy elektromotorů
- Synchronní elektromotory jsou z hlediska konstrukce složitější. Mají rotorové vinutí a napájení je dodáváno přes kartáčový mechanismus. Své jméno získaly díky synchronizaci rotace s magnetickým polem, které ji spouští.
- Asynchronní se snadno montují, a proto jsou nejoblíbenější (žádné navíjení, kartáče atd.). Jejich rotory se pohybují pomaleji než magnetické pole, což určuje asynchronní rotaci elektromotoru a jeho název.
V každodenním životě a průmyslu existují elektromotory různých typů, typů, tříd a výkonů. Nejoblíbenější zařízení zůstávají designově jednoduchá, která řeší problém přeměny elektřiny na mechanické otáčení hřídele. Ale i v této skupině existuje mnoho nuancí, které musíte znát, abyste mohli zařízení správně ovládat. Tato praxe (kompetentní použití elektromotorů pro jakýkoli účel) začíná pochopením toho, jak funguje (provozní principy).
Princip činnosti synchronního elektromotoru na videu
Princip činnosti asynchronního elektromotoru na videu
Konstrukce elektromotoru
Ústředním procesem fungování stejnosměrného elektromotoru (zkráceně DMC) je vstřikování točivého momentu v důsledku napětí dodávaného do cívek rotoru. Proces je možný díky 4 konstrukčním prvkům:
- kolektor;
- kartáčový mechanismus (2 kartáče + 2 desky/lamely);
- rotor elektromotoru (kotva u synchronního motoru má 1 vinutí);
- stator, na kterém jsou instalovány magnety (u stejnosměrných motorů – konstantní).
Rotor
Rotor je pohyblivý prvek elektromotoru, poháněný magnetickým polem a vykonává rotační pohyby společně s hřídelí. Má minimálně 3 zuby, z nichž jeden trvale spadá do oblasti připojení.
Komutátor motoru
Rotor se automaticky přepne. Tuto funkci má na starosti kolektor – struktura dvou lamel připevněných k hřídeli rotoru a dvou kartáčů, které fungují jako kontakty sběrače proudu (dodávají lamelám stejnosměrný proud). Princip fungování je následující:
- rotor se otáčí a mění směr proudu;
- když se kotva otočí o 180 stupňů, lamely změní místo;
- při změně poloh desek se mění jak směr proudu, tak (podle toho) póly magnetu;
- póly stejného jména se podle fyzikálních zákonů odpuzují – cívka se otáčí, její póly jsou přitahovány k opačným pólům na druhé straně magnetu.
Stator elektromotoru
Stator je stacionární nebo stacionární jednotka elektromotoru. Jiný název je induktor. Obsahuje několik vinutí s vratnou polaritou (při průchodu střídavého proudu), což zajišťuje vytvoření magnetického pole. Stator má ve většině případů 2 páry hlavních pólů, ale může obsahovat i pomocné póly pro lepší spínání rotoru na komutátoru.
Princip činnosti elektromotoru

Princip činnosti elektromotoru je založen na procesech vzájemného přitahování a odpuzování stejných a opačných pólů magnetů na rotoru (v pohybu) a statoru (jeho magnet je nehybný). V nejjednodušší sestavě stejnosměrného elektromotoru působí sestava cívky jako rotor a samotný magnet působí jako induktor.
Magnetické pole poskytuje vysokou účinnost s jedním vylepšením, což vytváří složitost mechanismu. Pro zajištění neustálého pohybu kotvy je nutné dosáhnout automatické změny jejích pólů (aby při přitahování k opačnému pólu stacionárního magnetu okamžitě změnil svůj pól). Jedině tak lze eliminovat „zamrzání“ kotvy a zajistit její nepřetržitý pohyb pod vlivem magnetického pole a setrvačnosti.
Magnetické pole elektromotoru
Princip činnosti statorového elektromotoru (nazývaného také indukční motor) je také založen na vytváření magnetického pole ze statoru. Vzniká při průchodu proudů jeho vinutím. Toto pole (rotující magnetické) tvoří magnetické pole rotoru indukcí proudů ve vinutích jeho vodičů.
To (statorové pole) vytváří svůj vlastní magnetický tok a je pozorován proporcionální vztah:
- magnetické pole statoru je úměrné elektrickému napětí v síti;
- magnetický tok produkovaný točivým polem je úměrný proudu.
Charakteristiky pole statoru závisí na proudech procházejících vinutími a počtu fázových vinutí. Magnetické pole rotoru zase také vytváří tok, který se pohybuje pomaleji než tok statoru. Oba proudy (stator a kotva) se vzájemně přitahují, což nutí rotor vykonávat rotační pohyby.
Tak vzniká kroutící moment – velmi klíčový proces, pro který je sestavena celá konstrukce elektromotoru. Vzhledem k roli statoru a rotoru při provozu střídavého elektromotoru lze snadno usoudit, že tyto 2 prvky mají největší význam při jeho montáži.
Stejnosměrný elektromotor (princip činnosti synchronního motoru)

Synchronní elektromotory znamenají zařízení na stejnosměrný proud. Princip fungování takového zařízení lze stručně popsat ve 4 bodech:
- stejnosměrný proud je dodáván do vinutí statoru (nazývané také induktor nebo budicí vinutí);
- procházející vinutím vytváří proud konstantní magnetické budicí pole (používá se permanentní magnet);
- do vinutí rotoru je také přiváděn stejnosměrný proud, který je ovlivněn statorovým polem, zajišťujícím vznik točivého momentu;
- pod vlivem rotační síly se rotor otočí o 90 stupňů.
Toto je jeden cyklus. Po otočení se vinutí kotvy opět dostává pod vliv magnetického pole statoru a rotor se opět otáčí.
Pro nepřetržitý provoz elektromotoru se musí póly permanentního magnetu rotoru vzájemně bez zastavení vyměnit. Ke změně dochází, když pól překročí „neutrál“ (nazývaný také magnetický neutrál). K zajištění tohoto (změna pólů) je prstenec kolektoru rozdělen na sektory dielektrickými lamelami, na které jsou střídavě připojeny okraje vinutí rotoru.
Pro připojení komutátoru k síti jsou nutné proudové sběrače, což jsou grafitové tyče s vysokou vodivostí a nízkým kluzným třením. Jako magnety lze použít fyzikálně existující materiály s vysokými magnetickými vlastnostmi. Ale často, kvůli jejich hmotnosti, ve vysoce výkonných stejnosměrných motorech jsou magnety nahrazeny několika kovovými kolíky / tyčemi. V tomto případě:
- každá tyč má své vlastní vinutí tvořené vodičem, který je připojen k napájecí sběrnici („+“ a „-“);
- zapínání pólů stejného jména se provádí postupně;
- počet párů pólů – 1 nebo 4;
- počet komutátorových kartáčů musí odpovídat tomuto počtu párů.
Vysokovýkonné synchronní elektromotory obsluhované stejnosměrným proudem mají řadu konstrukčních nuancí, z nichž některé se projevují v dynamice (během provozu zařízení). Mezi nimi je posunutí kartáčů komutátoru rotoru vzhledem k hřídeli pod určitým úhlem proti jeho otáčení při změně zatížení motoru. To je nezbytné pro kompenzaci jevu nazývaného reakce rotor/kotva a zabránění brzdění hřídele motoru, což snižuje účinnost zařízení k němu připojeného.
Způsoby připojení synchronního elektromotoru

Výhodou synchronních elektromotorů, kterou zajišťuje princip jejich činnosti, je progresivní (hladké) řízení rychlosti otáčení, což zajišťuje jejich vysokou účinnost při práci s trakcí – na vysokozdvižných vozíkech a elektrických strojích. V moderní praxi se používají 3 schémata zapojení pro stejnosměrné elektromotory: s paralelním, sériovým a kombinovaným buzením.
V prvním případě se spolu (paralelně) s vinutím rotoru spouští přídavné nastavitelné (obvykle) vinutí reostatu. Tato možnost je účinná, když normální provoz stroje vyžaduje plynulé nastavení rychlosti otáčení a maximální stabilitu počtu otáček za minutu. Příkladem jsou elektromotory pro jeřáby, průmyslové stroje a linky.
Při sériovém zapojení je pomocné vinutí rotoru zapojeno do série s procesním řetězcem buzení rotoru. To umožňuje v určitých okamžicích (například při rozjezdu vlaku) prudce zvýšit sílu elektromotoru.
Zařízení synchronního elektromotoru na videu
Princip činnosti UKD (univerzální komutátorové motory)
UKD (motory pro univerzální použití) se používají v zařízeních s nízkým výkonem a elektrickém nářadí (domácí, profesionální) – všude tam, kde je vyžadován vysoký točivý moment při dobrých otáčkách, plynulá regulace otáček a nízké startovací proudy. Konstrukce UCD je podobná jako u motoru, který je synchronní se sériovým obvodem elektromotoru.
Princip fungování UKD:
- při použití napětí se na statoru objeví magnetické pole;
- konstrukce magnetického drátu v UKD je poněkud odlišná – zde nejsou vyrobeny z masivního odlitku, ale prefabrikované, aby nedocházelo k převrácení magnetizace a zahřívání Foucaultovými proudy;
- pomocné vinutí rotoru (indukčnost) je připojeno k napájení sériově, což umožňuje nastavit stejný směr magnetických polí statoru a rotoru ve stejné fázi;
- magnetická pole induktoru a kotvy jsou téměř zcela synchronní – elektromotor nabírá otáčky při vysokém zatížení, což je důležité pro činnost mnoha nástrojů (příklepové vrtačky, šroubováky, vysavače, brusky atd.).
Po zapojení regulovatelného transformátoru do obvodu elektromotoru je přidána i možnost plynulé regulace rychlosti jeho otáčení. Ale změna vektoru magnetického pole, pokud se jedná o komutátorový střídavý motor, je za žádných okolností nemožná.
Univerzální komutátorový motor má mnoho výhod. Produkuje vysoký točivý moment/točivý moment, je schopen vyvinout vysokou rychlost otáčení a zároveň váží a zabírá málo místa. Existují i nevýhody: grafitové kartáče mají nízkou odolnost proti opotřebení (rychle se opotřebovávají při vysokých otáčkách), což snižuje životnost celé sestavy.
Asynchronní elektromotory

Střídavý motor (také známý jako asynchronní motor) také používá magnetické pole k vytvoření točivého momentu. Jeho vynálezcem je ruský elektrofyzik Michail Osipovič Dolivo-Dobrovolskij. První příklad asynchronního elektromotoru se objevil v roce 1890 (u něj začala teorie a praxe používání 3fázového střídavého proudu).
Konstrukce a uspořádání střídavých elektromotorů:
- Na každém statoru jsou navinuta 3 vinutí;
- 1 ze 3 fází je připojena ke každému vinutí;
- Pro chlazení vinutí, která se velmi zahřívají a procházejí jimi střídavé proudy, je na koncovém hřídeli elektromotoru instalován chladič (ventilátor).
Tok proudů a napětí 3fázovou sítí má grafickou podobu sinusoidy (plynulá změna provozních parametrů). Výkon ve vinutí plynule roste, jak se pohybuje od konce sinusovky ke svému vrcholu, a opět klesá, „sestupuje“ shora na druhý konec, dosahuje minima na obou koncích a maxima nahoře.
- napětí přiváděné ze 3 fází do vinutí statoru tvoří magnetické pole (jeho frekvence otáčení se rovná frekvenci otáčení v síti – 50 Hz);
- rotor je umístěn uvnitř induktoru a také v něm vzniká jeho vlastní pole;
- Rotorové pole je odpuzováno od pole statoru a generuje točivý moment.
Vzhledem k tomu, že střídavé elektromotory používají zkratovaný systém, při interakci magnetického pole statoru a vinutí rotoru vzniká v tomto rotoru velmi velký proud. Tvoří své vlastní kotevní pole. Při kontaktu podle zákonů vzájemné přitažlivosti/odpuzování pólů s magnetickým tokem induktoru uvede pole rotoru hřídel motoru do pohybu ve směru podobném směru tohoto pole.
Návrh střídavého elektromotoru na videu
Proč asynchronní?
Rychlost magnetických polí rotoru a statoru je podobná, ale první je ve fázi o 8–100 stupňů za druhým, což zajišťuje asynchronní chod hlavních prvků (odtud název). Charakteristickým rysem takových elektromotorů je vytváření velmi velkých startovacích proudů. To je typické pro klasická zařízení nakrátko (ta, jejichž kontrolky při spuštění blikají). Aby se snížilo riziko přetížení během jejich provozu, používá se řada opatření:
- u strojů s vysokým výkonem se používá fázová kotva se třemi vinutími zapojenými do hvězdy;
- Vinutí rotoru není připojeno přímo k elektrické síti, ale přes kolektor (kartáče, desky) připojený ke spouštěcímu reostatu.
V důsledku toho, když takový elektromotor začne pracovat, je připojen k napájení a aktivní odpor v obvodu rotoru se postupně snižuje na nulu. Žádné blikání, žádné přetížení – střídavý motor se spouští hladce.
Výhody střídavých motorů

Elektromotory asynchronního typu umožnily provozovat 3-fázovou síť, která je ve skutečnosti tvořena třemi samostatnými obvody se sinusovými hnacími silami (EMF) v každém z nich. EMF ve fázích mají stejnou frekvenci, jsou vytvářeny jedním zdrojem (obvykle 3-fázovým generátorem), ale jsou vůči sobě posunuty o 120 stupňů.
3-fázová síť je vyvážený systém s konstantním okamžitým celkovým výkonem a střídavý motor, který ji pohání, má nesporné výhody. Mezi nimi:
- jednoduchá obsluha;
- nízká cena;
- spolehlivost;
- účinnost z hlediska řízení točivého momentu a rychlosti. Je zajištěna ovladatelností elektromotoru (jeho dynamiky) pomocí signálu (digitálního nebo analogového). Navíc lze 3-fázový motor „udělat“ tak, aby se otáčel v libovolném směru změnou směru střídavého proudu na vinutí rotoru.
Jednofázové elektromotory
Spolu s 3-fázovými motory jsou v praxi hojně využívány také 1-fázové asynchronní elektromotory. Jsou to elektrická zařízení napájená z domácí sítě o napětí 220 V (kmitočet – 50 Hz). Stejně jako 3-fázový analog funguje tak, že převádí přijatou elektřinu na mechanickou akci – rotaci.
Konstrukce a princip činnosti 1fázového motoru je jednodušší:
- Na statoru jsou vytvořena nejméně 2 vinutí – startovací a pracovní;
- osy vinutí musí být vůči sobě posunuty o 90 %;
- do návrhu je přidán další prvek – prvek s fázovým posunem (může to být cívka, kondenzátor nebo odpor);
- Napájení je dodáváno přes AC zdroj do vinutí.
1-fázové střídavé elektromotory jsou instalovány na domácích spotřebičích (od praček odstředivek po chladničky) a nízkoenergetických strojích pro výrobní podniky.
Porovnání jednofázových a třífázových elektromotorů

Ve srovnání s 3-fázovými 1-fázovými asynchronními motory jsou poněkud horší v řadě charakteristik:
- výkon prvního jmenovaného je při podobných rozměrech alespoň o 30 % nižší;
- jednofázová zařízení nejsou schopna nečinnosti déle než 5–10 minut;
- Přetížitelnost třífázových je mnohem vyšší.
UKD
Hlavní výhodou univerzálního komutátorového elektromotoru (který může být napájen stejnosměrným nebo střídavým proudem) je jeho účinnost. Maximální točivý moment a spotřeba proudu takových zařízení jsou omezeny kvůli indukční reaktanci při nízkých rychlostech.
Motory se zvýšeným prokluzem
Samostatnou skupinou elektromotorů by měla být třífázová zařízení se zvýšeným odporem vinutí rotoru, který zajišťuje kritický skluz. U mechanismů se zvýšeným posuvem je to 40 %. Sami se používají u strojů s velkou setrvačností, pracujících v režimu častých krátkodobých startů.
Katalog elektromotorů za cenu výrobce
Katalog PTC Privod LLC zahrnuje širokou škálu elektromotorů pro provoz v jednofázových a třífázových sítích. Každý model zařízení má podrobný popis (technické vlastnosti, dekódování názvu, rozměry, informace o výrobci atd.). V našem sortimentu je snadné si vybrat a můžete se ziskem koupit elektromotory pro řešení široké škály problémů.





























