7.2: Klasická mechanika
Pokud vám ve škole nechyběly hodiny fyziky, tak si to pamatujte vynutit je efekt, který uvádí tělo do pohybu v průběhu času. Například jednoduchá lineární síla může tlačit (nebo tahat) hmotu v klidu a měnit její rychlost zrychlováním. Točivý moment je síla, která způsobuje, že se těleso otáčí podél své osy otáčení. Točivý moment je tedy kroutící síla zvaná rotační síla.
Nejviditelnějším příkladem točivého momentu je hnací hřídel automobilu. Točivý moment hřídele generovaný motorem uvádí vozidlo do pohybu. Točivý moment je vektor: to znamená, že má směr.
Točivý moment je síla, která otáčí nebo otáčí hnací hřídel, šroub nebo kolo.
Kroutící moment se také nazývá moment nebo moment síly. Točivý moment je obvykle označen symbolem (tau) (řecké písmeno „t“). Jednotka točivého momentu v SI je (N⋅m (Nm)).
V USA se k jeho vyjádření používají stopové libry ((ft/lbs)). Chcete-li převést (N⋅m) na (ft/lbs), jednoduše vydělte N⋅m číslem 1,356.
Proč se měří točivý moment?
Měření mechanického krouticího momentu torzních hřídelů je kritickou fází při návrhu a montáži různých strojů a také při jejich odstraňování. Skutečná hodnota mechanického točivého momentu hřídele, vrtule nebo jiné rotující součásti je jediný způsob, jak zjistit, zda splňují požadavky.
V některých případech musí být krouticí moment nepřetržitě monitorován, například aby se zabránilo potenciálně nebezpečnému překroucení, které by mohlo vést k selhání systému. Měření točivého momentu hraje také důležitou roli v prediktivní údržbě.
Jaké typy točivého momentu existují?
Točivý moment se dělí na dva typy: rotační a reaktivní:
- rotující — tj. rotační nebo dynamický točivý moment;
- reaktivní – tedy stacionární nebo statický točivý moment.
Točivý moment
Tělesa, která se opakovaně (nebo neustále) otáčejí kolem své osy (například hřídele, turbíny, kola), mají krouticí moment.
Reaktivní moment
Statická síla působící na těleso se nazývá reaktivní moment. Když se například pokoušíte utáhnout šroub klíčem, působí na šroub reakční síla. Tato síla je vyvíjena, i když se šroub neotáčí. V takových případech se točivý moment neměří na celou otáčku.
Jak se měří točivý moment?
Točivý moment lze měřit nepřímo nebo přímo. Pokud je známa účinnost motoru a otáčky hřídele, lze točivý moment vypočítat pomocí měřiče výkonu. Toto měření se nazývá nepřímé.
Přesnější metodou je přímé měření točivého momentu pomocí snímačů točivého momentu nebo rotačních měřičů točivého momentu. v čem se liší?
Reaktivní (statické) snímače točivého momentu
Snímač reakčního momentu měří statický moment.
příklad snímač točivého momentu – momentový klíč. Tyto klíče lze použít k přesnému měření krouticího momentu aplikovaného na šroub, matici nebo jiný spojovací prvek. Základna klíče umožňuje nastavit požadovaný utahovací moment, po kterém se ozve cvaknutí, když obsluha utáhne spojovací prvek na požadovaný utahovací moment. Takové klávesy se zpravidla nazývají klikací klávesy. Můžete na nich nastavit několik hodnot točivého momentu.
Digitální momentové klíče mají jehlu nebo digitální displej, který ukazuje velikost působící síly. Řada elektronických modelů (často průmyslových) má paměť, ve které je uložena každá naměřená hodnota (pro dokumentaci nebo kontrolu kvality).
Princip činnosti klikového momentového klíče je demonstrován v následujícím videu:
Snímač reakčního momentu je založen na křemenném piezoelektrickém snímači nebo tenzometru. Dnes jsou na trhu různé typy a konfigurace momentových klíčů a šroubováků.
Snímače točivého momentu
Snímač točivého momentu je převodník, který převádí točivý moment na signál, který lze měřit, analyzovat, zobrazovat a ukládat. Měniče točivého momentu se používají pro testování točivého momentu motoru, testování spalovacích motorů, testování elektromotorů, hřídelí, turbín, generátorů atd.
Krouticí moment lze měřit přímo nebo nepřímo.
Nepřímý Měření točivého momentu je ekonomičtější a pohodlnější metoda měření, jejíž přesnost je nižší než u metody přímého měření. Je vhodný pro aplikace, kde je známa účinnost motoru a lze měřit otáčky hřídele a průtok proudu.
Přímý měření je přesnější způsob. Pro přímé měření je na hřídeli připevněn tenzometr, který měří krouticí moment na hřídeli.
Když se hřídel otáčí motorem, rotační síla bude zanedbatelná. Vzhledem k tuhosti oceli není rotace vidět, ale lze ji měřit pomocí tenzometrů připevněných k hřídeli. Čtyři snímače tvoří Wheatstoneův můstek, jehož výstup je vyvážen a normalizován systémem měření točivého momentu.
Výstup siloměru lze přenášet po drátě (pokud je to možné) nebo dálkově do systému měření točivého momentu nebo sběru dat.
Uvnitř snímače točivého momentu jsou výstupy snímačů zatížení na hřídeli přenášeny do elektronických součástek přes sběrací kroužek (snímače zatížení musí být napájeny). Můžete také připojit bezkomutátorový nebo indukční snímač: zvyšuje rychlost a méně se opotřebovává, což znamená, že vyžaduje méně údržby. Úhel a rychlost otáčení lze měřit pomocí bezkontaktní metody.
Systémy sběru dat Dewesoft jsou ideálním řešením pro měření jakýchkoliv fyzikálních parametrů, včetně točivého momentu. Mají vestavěné jednotky pro konverzi izolovaného signálu, které snižují šum a zajišťují vysokou přesnost dat. Mají také vstupy čítače, rychlosti a enkodéru, díky čemuž jsou vhodné pro současné měření rychlosti, úhlu a polohy hřídele. V systémech sběru dat jsou data z analogových a digitálních měřičů vzájemně zcela synchronizována a tento faktor hraje důležitou roli při řešení jakýchkoli problémů, zejména při testování torzních a rotačních vibrací. Více o tom v další části.
Stacionární systémy měření točivého momentu
Ve výše uvedeném systému je snímač točivého momentu namontován mezi motorem a brzdou s přípojkami na každé straně. Snímač procházející hřídelí je vybaven siloměrem, který měří krouticí moment hřídele. Po převedení je výstup signálu odeslán do systému sběru dat, digitálního displeje nebo poplachového systému (když se data spíše monitorují než zapisují).
V případě potřeby mohou být snímače točivého momentu vybaveny enkodérem, který přesně zobrazuje otáčky a úhel hřídele. Tyto poznatky se používají k analýze torzních a rotačních vibrací. Výstupy otáček a úhlu jsou kritické při použití dynamometrů k výpočtu výkonu (vyjádřeného v (HP) nebo (Kw)) a účinnosti motoru.
Přenosné systémy pro měření točivého momentu
Pro dočasná měření krouticího momentu lze na hnací hřídel namontovat tenzometry. Kompaktní bateriově napájené rozhraní napájí senzory a přenáší data na dálku do blízké konverzní jednotky, kde je lze zaznamenávat, zobrazovat nebo analyzovat pomocí systému sběru dat.
Bezdrátové senzory Parker-Lord jsou kompatibilní se softwarem Dewesoft X a lze je kombinovat se systémy sběru dat a používat na neomezeném počtu kanálů.
Aplikace ordinální analýzy
Torzní vibrace mohou způsobit selhání torzních hřídelů. Analýza rotačních a torzních vibrací je důležitým nástrojem pro odstraňování problémů s hřídelemi, klikovými hřídeli a ozubenými koly v automobilovém, průmyslovém a energetickém průmyslu.
Co je to torzní vibrace?
Torzní vibrace jsou úhlové vibrace tělesa (obvykle hřídele podél osy otáčení). Údaje o mechanických vibracích jsou způsobeny změnami točivého momentu v čase superponovanými na konstantní otáčky torzního hřídele. V automobilovém průmyslu je hlavní příčinou torzních vibrací kolísání čistého výkonu motoru.
Torzní vibrace se posuzují jako změna rychlosti otáčení během cyklu otáčení. Změny rychlosti otáčení jsou způsobeny nestabilním kroutícím momentem nebo proměnným zatížením.
Co je rotační vibrace?
Rotační vibrace jsou dynamickou složkou rychlosti otáčení. Při přesném měření rotačních vibrací hřídele lze v některých oblastech zrychlení pozorovat silnou odchylku v rychlosti otáčení. Vychýlení je způsobeno úhlovou vibrací protínající vlastní úhlovou frekvenci hřídele. Úhlové vibrace se vypočítávají odříznutím konstantní složky rychlosti nebo úhlu rotace;
Torzní kmitání závisí na řadě parametrů: vlastnostech materiálu a provozních podmínkách (teplota, zatížení, rychlost otáčení atd.).
Jak měřit rotační a torzní vibrace
Toto krátké video ukazuje, jak měřit vibrace a rotaci, a popisuje základní teorii a praktické výhody takových měření.
Video měření torzních a rotačních vibrací
Dewesoft X Torsional Vibration Module automaticky vypočítá následující parametry:
- úhel natočení: filtrovaná hodnota úhlu vibrací;
- rychlost otáčení: filtrovaná hodnota rychlosti vibrací;
- torzní úhel: dynamický torzní úhel, což je rozdíl mezi úhly získanými ze snímače 1 a snímače 2;
- torzní rychlost: rozdíl v úhlových rychlostech získaných ze snímače 1 a snímače 2;
- Referenční úhel osy X: referenční úhel, který je vždy mezi 0 a 360° a lze jej použít jako referenci v grafu XY;
- frekvence: ot./min
Výpočty lze provádět během měření i během fáze zpracování (z nezpracovaných dat).
Pro více informací:
Analýza torzních kmitů
Celkový
Snímače točivého momentu se používají k řešení stovek problémů napříč všemi průmyslovými odvětvími. Snímače reakčního momentu se používají v momentových klíčích a dalších nástrojích.
V automobilovém průmyslu jsou snímače točivého momentu instalovány v testovacích stojanech motorů, dynamometrech, testovacích stojanech a stojanech pro testování životnosti. Ale to jsou jen základní aplikace, kromě toho se senzory používají k testování průmyslových klimatizačních jednotek, velkorozměrových krmítek pro zvířata a ptáky, robotiky, montážní a zdravotnické techniky, elektrických zařízení atd.
Točivý moment je důležitým parametrem v mnoha průmyslových odvětvích. Naštěstí jej lze měřit pomocí senzorů a převodníků a zobrazovat, zaznamenávat a analyzovat pomocí systémů sběru dat.
Obor klasické mechaniky zahrnuje studium těles v pohybu, zejména fyzikálních zákonů, které platí pro tělesa působením sil. Většina mechanických aspektů konstrukce robotů úzce souvisí s koncepty z této oblasti. Tato jednotka popisuje několik klíčových konceptů klasické mechaniky, které se používají.
SPEED — je měřítkem toho, jak rychle se objekt pohybuje. Označuje změnu polohy v průběhu času (zjednodušeně řečeno, jak daleko může objekt cestovat za daný časový úsek). Tato míra je vyjádřena v jednotkách vzdálenosti za jednotku času, jako jsou míle za hodinu nebo stopy za sekundu.
FREKVENCE OTÁČENÍ – Rychlost lze také vyjádřit pomocí rotace, to znamená, jak rychle se objekt pohybuje v kruhu. Měřeno v jednotkách úhlového posunutí za čas (tj. ve stupních za sekundu) nebo v rotačních cyklech za jednotku času (např. otáčky za minutu). Když jsou měření prezentována v otáčkách za minutu (RPM), mluvíme o rychlosti otáčení. Pokud mluvíme o otáčkách motoru automobilu, znamená to, že se měří rychlost otáčení motoru.
AKCELERACE – Změna rychlosti v čase je zrychlení. Čím větší je zrychlení, tím rychleji se mění rychlost. Pokud auto zrychlí z 0 na 60 mph za dvě sekundy, pak je zrychlení větší, než když za stejnou dobu zrychlí z 0 na 40 mph. Zrychlení je měřítkem změny rychlosti. Žádná změna neznamená žádné zrychlení. Pokud se objekt pohybuje konstantní rychlostí, nedochází k žádnému zrychlení.
Síla — Zrychlení je výsledkem sil, které způsobují změnu pohybu, směru nebo tvaru. Pokud na předmět zatlačíte, znamená to, že na něj působíte silou. Robot zrychluje díky síle, kterou jeho kola působí na podlahu. Síla se měří v librách nebo newtonech.
Například hmotnost předmětu působí na předmět jako síla v důsledku gravitace (zrychlení předmětu směrem ke středu Země).
TOČIVÝ MOMENT – Síla směřující do kruhu (rotace předmětu) se nazývá točivý moment. Točivý moment je rotační síla. Když je na objekt aplikován krouticí moment, na jeho hranici se generuje lineární síla. V příkladu kola odvalujícího se po zemi vytváří točivý moment působící na osu kola lineární sílu na hranici pneumatiky v místě kontaktu s povrchem země. Takto je definován točivý moment – jako lineární síla na hranici kruhu. Kroutící moment je určen velikostí síly násobenou vzdáleností od středu otáčení (Síla x Vzdálenost = Kroutící moment). Točivý moment se měří v jednotkách síly násobené vzdáleností, jako jsou libra-palce nebo newtonmetry.
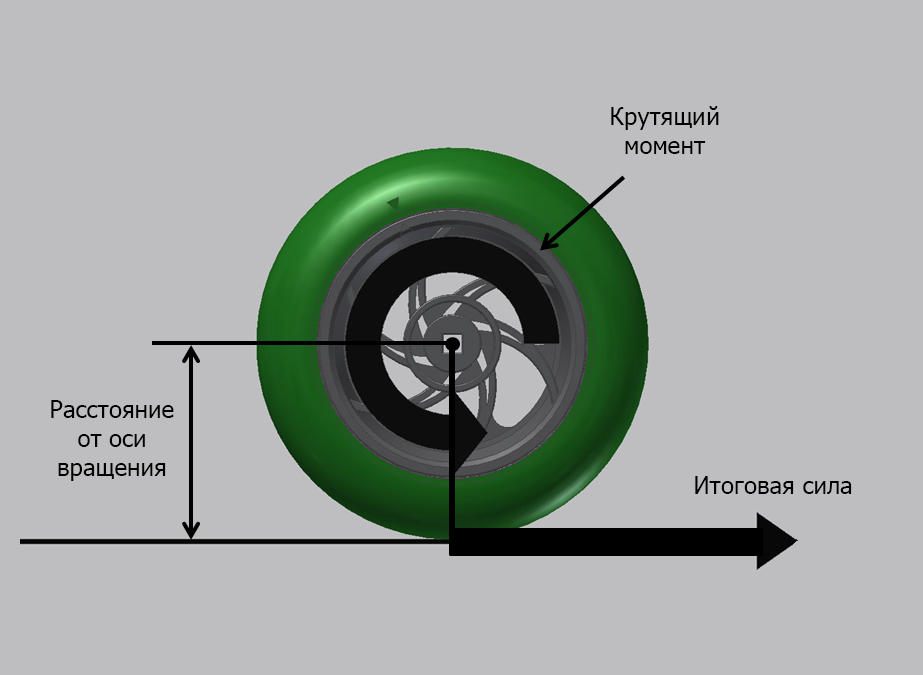
V příkladu kola odvalujícího se po zemi, známe-li točivý moment působící na nápravu s připojeným kolem, můžeme vypočítat velikost síly, kterou kolo působí na povrch. V tomto případě je poloměr kola vzdálenost síly od středu otáčení.
Síla = točivý moment / poloměr kola
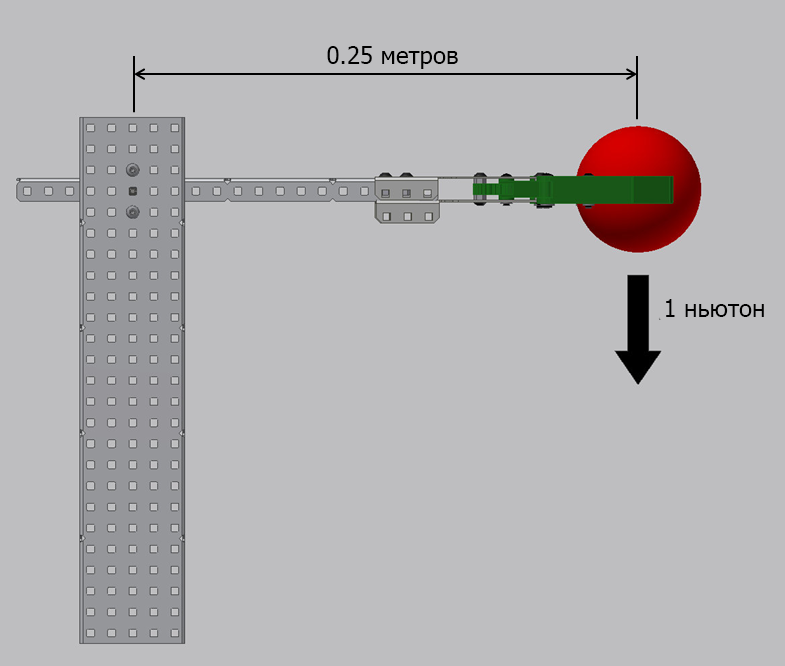
V příkladu ramene robota držícího předmět můžeme vypočítat krouticí moment potřebný ke zvednutí předmětu. Pokud má předmět hmotnost 1 newton a rameno je dlouhé 0,25 metru (objekt je umístěn 0,25 metru od středu otáčení), pak
Točivý moment = Síla x Vzdálenost = 1 Newton x 0,25 metru = 0,25 Newtonmetru.
To znamená, že pro udržení předmětu v nehybné poloze je nutné použít krouticí moment 0,25 Newtonmetru. Aby mohl robot přesunout předmět nahoru, musí na něj vyvinout točivý moment přesahující 0,25 Newtonmetru, protože musí překonat gravitační sílu. Čím větší točivý moment má robot, tím větší sílu na předmět působí, tím větší je zrychlení předmětu a tím rychleji rameno předmět zvedne.
Pro tyto příklady můžeme vypočítat točivý moment potřebný ke zvednutí těchto předmětů.
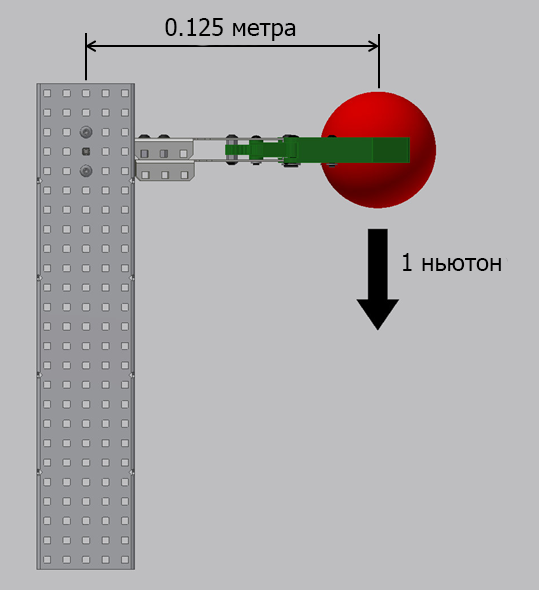
Příklad 7.2 – Točivý moment = síla x vzdálenost = 1 newton x 0,125 metru = 0,125 newtonmetru.
V tomto příkladu je délka ramene poloviční než délka ramene z příkladu 1, takže požadovaná hodnota točivého momentu je také poloviční. Hodnota délky ramene je úměrná požadované hodnotě točivého momentu. Při stejných počátečních charakteristikách předmětu platí, že čím kratší je rameno, tím menší krouticí moment je potřebný pro zvedání.
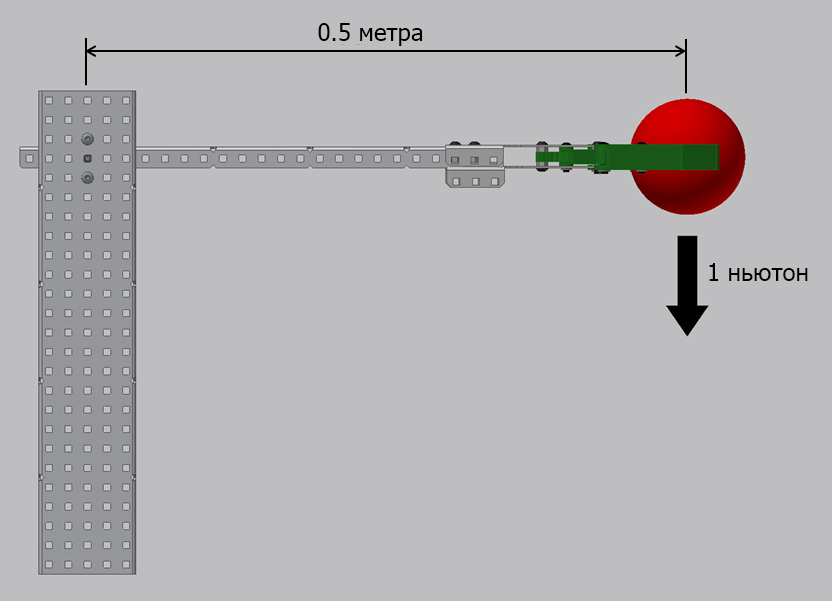
Příklad 7.3 – Točivý moment = Síla * Vzdálenost = 1 Newton x 0,5 metru = 0,5 Newtonmetru.
V tomto příkladu je délka ramene dvojnásobkem délky ramene z příkladu 1, takže požadovaná hodnota točivého momentu je také dvakrát větší.
Dalším úhlem pohledu na omezený točivý moment v kloubu ramena robota je, že kratší rameno bude schopno zvednout větší předmět než delší rameno; u prvního však bude dostupná výška zvedání předmětu menší než u druhého.
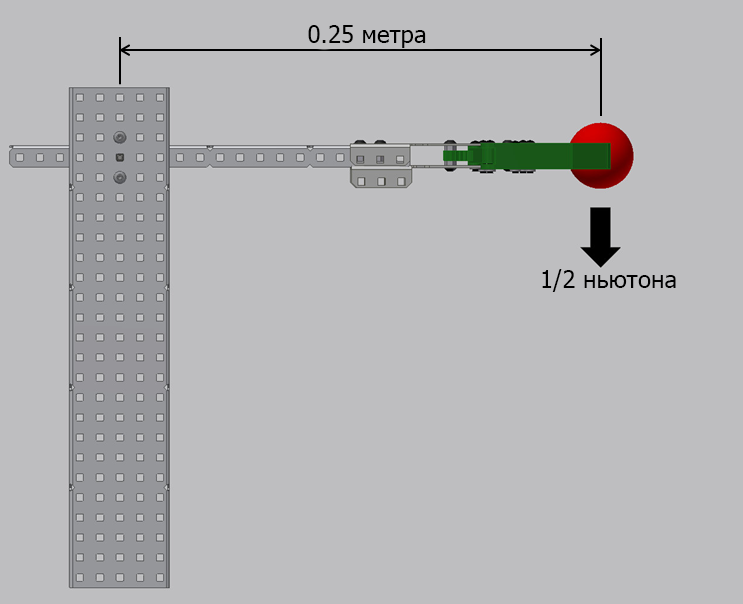
Tyto příklady ilustrují robotické rameno, které zvedá předměty různé hmotnosti. Jaký je vztah s požadovaným točivým momentem?
Příklad 4 – Točivý moment = síla x vzdálenost = ½ Newtonu x 0,25 metru = 0,125 Newtonmetru.
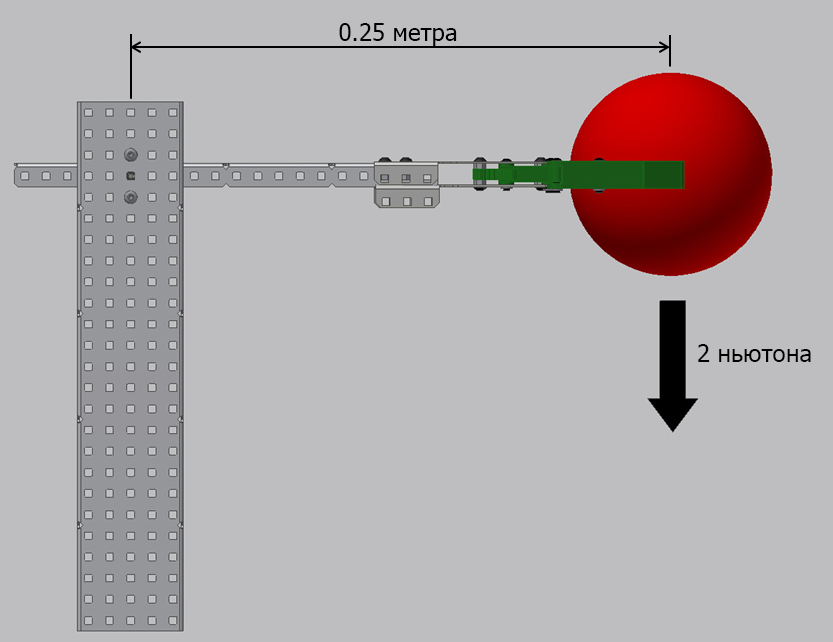
Příklad 5 – Točivý moment = Síla x Vzdálenost = 2 Newtony x 0,25 metru = 0,5 Newtonmetru.
Tyto příklady ilustrují pokles hodnoty požadovaného krouticího momentu s klesající hmotností předmětu. Hmotnost je úměrná točivému momentu potřebnému k jeho zvednutí. Čím je předmět těžší, tím větší krouticí moment je potřeba k jeho zvednutí.
Konstruktéři robotů musí věnovat pozornost klíčovým vztahům mezi hodnotami točivého momentu, délkou ramene a hmotností předmětu.
PRÁCE – Míra síly působící na vzdálenost se nazývá práce. Například k udržení předmětu je potřeba 10 liber síly. Nyní, zvednout ten předmět 10 palců vysoko, vyžaduje určité množství práce. Množství práce potřebné ke zvednutí předmětu o 20 palcích se zdvojnásobí. Práce je také chápána jako změna energie.
NAPÁJENÍ — Většina lidí si myslí, že síla je elektrický termín, ale síla platí také pro mechaniku.
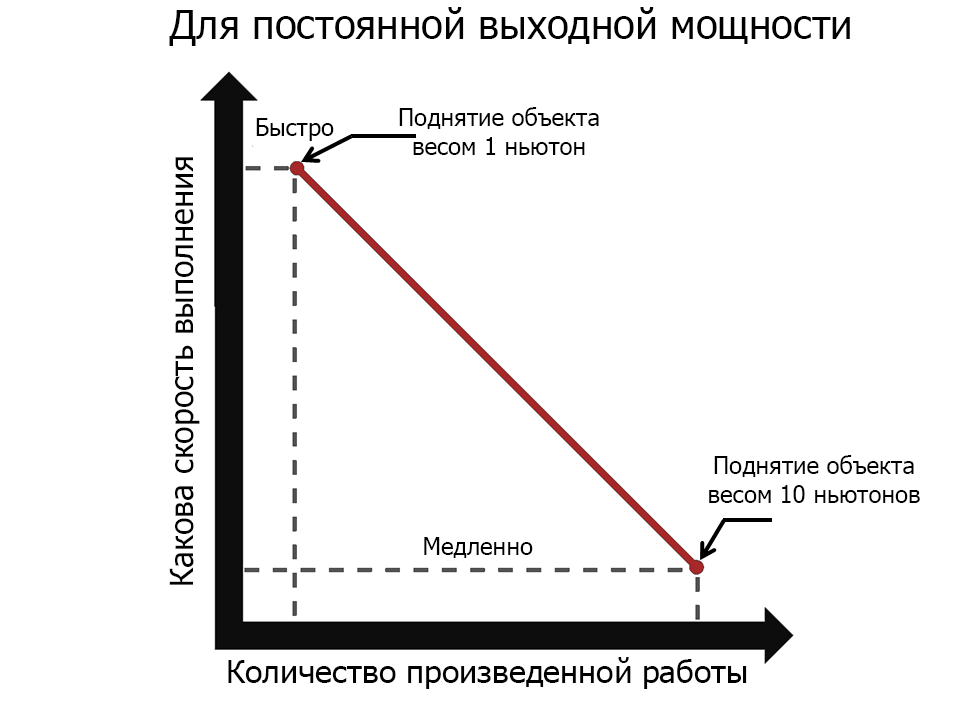
Výkon je množství práce za jednotku času. Jak rychle může někdo dokončit práci?
V robotice je běžné chápat výkon jako omezení, protože konkurenční robotické systémy mají omezení, pokud jde o výstupní výkon. Pokud robot potřebuje zvednout hmotu 2 newtony (aplikací síly 2 newtony), bude rychlost zvedání omezena množstvím výkonu robota. Pokud robot dokáže vyrobit dostatek energie, dokáže rychle zvednout předmět. Pokud je schopen produkovat pouze malé množství energie, bude objekt zvednut pomalu (nebo vůbec!).
Výkon je definován jako síla vynásobená rychlostí (jak rychle se stisk provede při konstantní rychlosti) a obvykle se vyjadřuje ve wattech.
Výkon [Watty] = síla [Newtony] x rychlost [metry za sekundu]
1 Watt = 1 (Newton x metr) / sekunda
Jak to platí pro konkurenční robotiku? Pro projekty robotů platí určitá omezení. Konstruktéři soutěžních robotů využívajících systém VEX Robotics Design musí brát v úvahu i fyzikální omezení použití elektromotorů. Elektromotor má omezený výkon, takže při dané rychlosti může vyrobit jen určité množství práce.
Poznámka: Všechny nadějné koncepty mají základní popis. O těchto fyzikálních vlastnostech budou studenti hlouběji diskutovat během svého vysokoškolského studia, pokud si jako studijní obor zvolí obor STEM.
Články v aktuální sekci
- 7.1: Úvod
- 7.2: Klasická mechanika
- 7.3: Stejnosměrné elektromotory
- 7.4: Ruční design
- 7.5: Simulace a dimenzování stejnosměrného motoru
- 7.6: Vzorce
- 7.7: Zpráva o projektu