Hallův senzor v pračce: princip činnosti, přenos dat a rozdíl od tacho senzoru

Moderní pračky jsou vybaveny mnoha senzory, které jim pomáhají pracovat efektivněji a bezpečněji. Jednou z těchto důležitých složek je Hallův senzor. Tento senzor hraje klíčovou roli při sledování a řízení chodu motoru pračky a také zajišťuje přesné otáčení bubnu. V tomto článku se podrobně podíváme na princip fungování Hallova senzoru, jak přenáší informace do řídicího modulu a čím se liší od tacho senzoru.
Co je to Hallův senzor?
Hallův senzor je elektronická součástka, která se používá k měření magnetických polí. Byl vyvinut v roce 1879 americkým fyzikem Edwardem Hallem a stal se základem pro vytvoření mnoha různých senzorů v elektronické technologii. V pračce se používá Hallův senzor ke sledování polohy a rychlosti otáčení motoru a bubnu.
Hallův senzor funguje na základě Hallova jevu: když magnetické pole protíná polovodičový materiál, objeví se na jeho okrajích napětí, které lze změřit. Toto napětí je úměrné velikosti magnetického pole, a proto jeho změny mohou signalizovat různé děje v provozu stroje, jako je rychlost otáčení bubnu nebo poloha rotoru.
Jak Hallův senzor přenáší informace do řídicího modulu?
Hallův senzor v pračce se obvykle používá ke sledování polohy rotoru nebo rychlosti otáčení motoru. Jeho práce úzce souvisí s magnetickým polem, které se vytváří na hřídeli motoru nebo jiném rotujícím prvku.
- Generování signálu: Hallův snímač obsahuje magnet, který se otáčí s bubnem nebo rotorem. Pokaždé, když kolem Hallova senzoru projde magnet, senzor vygeneruje elektrický impuls. Počet takových impulsů je úměrný rychlosti otáčení rotačního prvku.
- přenos signálu: Signály, které Hallův senzor generuje, jsou přenášeny řídicí modul (nebo elektronická řídicí jednotka). Tento signál je obvykle digitální pulzní výstup (zapnuto/vypnuto), který indikuje, že magnet prošel kolem senzoru.
- Zpracování dat řídicím modulem: Řídicí modul přijímá informace ze snímače a používá je k výpočtu rychlosti otáčení bubnu nebo rotoru. Tyto informace jsou nezbytné pro přesné řízení pohybu motoru. Řídicí modul může také používat data ke sledování otáčení bubnu v různých směrech a v případě potřeby také upravit rychlost odstřeďování. Pokud dojde k poruše nebo žádný signál z Hallova snímače, řídicí modul nemusí nastartovat motor nebo zastavit stroj, aby nedošlo k poškození.
Jak řídicí modul využívá data z Hallova senzoru?
Řídicí modul pračky přijímá data z Hallova senzoru do:
- Rychlost otáčení koleje: Získané informace pomáhají řídit rychlost otáčení bubnu, zejména během fází odstřeďování, kdy je důležité přesné nastavení.
- Pochopte polohu bubnu: Signály ze snímače pomáhají řídicímu modulu určit směr otáčení bubnu a udržovat správnou orientaci.
- V případě poruchy zastavte vůz: Pokud řídicí modul neobdrží data z Hallova senzoru, může to považovat za poruchu a zastavit stroj, aby se předešlo vážnějšímu poškození.
Jaký je rozdíl mezi Hallovým senzorem a tacho senzorem?
Ačkoli Hallův snímač a otáčkoměr plní podobné funkce (jako je sledování otáček motoru), mají několik důležitých rozdílů.
- Princip činnosti:
- Hallův senzor: Používá magnetické pole k vytvoření signálu. V závislosti na provedení může být buď digitální (pulzní výstup) nebo analogový.
- Tacho senzor: Je to generátor střídavého napětí, který vytváří sinusový nebo pulzující signál v závislosti na otáčkách motoru. Tacho senzor obvykle produkuje analogový signál.
- Typ signálu:
- Hallův senzor obvykle generuje digitální impulsy, díky čemuž je odolnější vůči šumu a snáze se zpracovává data.
- Tacho senzor vytváří analogový signál, který musí být převeden na digitální signál pro zpracování v moderních systémech.
- přihláška:
- Hallův senzor se častěji používá k ovládání polohy a rychlosti otáčení v moderních pračkách, protože jeho signály se snáze zpracovávají.
- Tacho senzor Tradičně se používá u starších modelů a některých průmyslových strojů pro přesnější řízení otáček motoru.
- Citlivost na vnější rušení:
- Hallův senzor méně citlivý na vnější rušení, protože funguje na bázi magnetického pole, takže je spolehlivější v prostředích, kde je vyžadováno přesné měření rychlosti.
- Tacho senzor může být náchylnější k rušení a hůře zpracovatelné signály, takže je méně vhodný pro moderní systémy.
Závěr
Hallův senzor je důležitou součástí moderní pračky, pomáhá řídit rychlost a směr otáčení motoru. Přenáší informace do řídicího modulu, který tato data zpracovává, aby přesně reguloval chod stroje. Rozdíl mezi Hallovým senzorem a tacho senzorem spočívá v principu činnosti, typu signálu a použití v různých modelech praček. Hallův senzor se díky své přesnosti a spolehlivosti stal standardem ve většině moderních praček a zajišťuje stabilnější provoz zařízení
Tento úvodní článek je určen pro úplné začátečníky, čtenáře „pokročilé“ v oboru elektroniky může zajímat další, kde se dostanu k rozboru obvodů; skutečná auta
Alma mater je už dávno za zdí, ale svět se dnes tak rychle mění, že musíte vždy utíkat, i když chcete jen stát na místě. V oblasti vývoje elektronických technologií je tato nesmrtelná věta od Alice asi nejrelevantnější. V posledních letech jsem si pořídil nový koníček – opravy domácí elektroniky. Opravuji ne kvůli penězům, čistě pro sebe a své příbuzné, co jsem předtím bez rozmyslu vyhodil a nahradil to novým.
Elektronický obsah moderních domácích spotřebičů, zvláště pokud se nebavíme o montáži na kolena z dílny Uncle Lee’s, ale od známých značek, je zázrakem optimalizace. Při opravách zároveň sleduji pozoruhodná technická řešení a usmívám se, když si všímám chyb designérů. Někdy může být extrémně obtížné vysvětlit je jinak než požadavky obchodníků na zavedení prvků „plánovaného zastarávání“ do designu.
Počasí venku moc nepřeje, další prototyp se posílá do zkušebního provozu, proč nám neřekneš něco zajímavého? Dlouho jsem nepsal na Habr!
Proč motory, proč pračky?
Tedy alespoň proto, že motory praček jsou skvělé pro mnoho domácích projektů a získat je je snadné. Můžete ho vydolovat z vlastní staré pračky, nebo si ho můžete koupit na Avitu za směšné peníze! Pro ty, kteří raději jednou uvidí, než přečtou deset, poslouží jako bonus k článku doprovodná videa z mého kanálu.
důležitý doplněk v důsledku komentářů v komentářích
Připomínky obsahovaly řadu připomínek týkajících se níže popsaného typu motoru. Abych byl upřímný, přesnou odpověď neznám. S největší pravděpodobností mají komentátoři pravdu a mělo by se tomu říkat sběratel. Na druhou stranu se v tomto zapojení otáčky motoru liší od frekvence proudu na vinutí a z tohoto pohledu je v tomto konkrétním zapojení lze nazvat asynchronní.
Mnoho zdrojů to dělá a nazývá to kolektor asynchronní. Snad pro odlišení od jiné modifikace asynchronního motoru, ve které není vinutí rotoru a rotor je jádro s hliníkovými tyčemi zkratované koncovými kroužky.
V této takzvané „kleci na veverku“ se vytváří pole, které interaguje s polem statoru a vede k otáčení rotoru.
Tacho senzor. Co je to za zvíře a proč je to potřeba?

Ve většině moderních praček pracují střídavé komutátorové motory triak, který reguluje napětí na motoru a směr otáčení se přepíná pomocí relé. Je zřejmé, že pro nastolení a udržení stabilní rychlosti otáčení je nutné tuto rychlost alespoň určit. K tomu slouží tachometr.
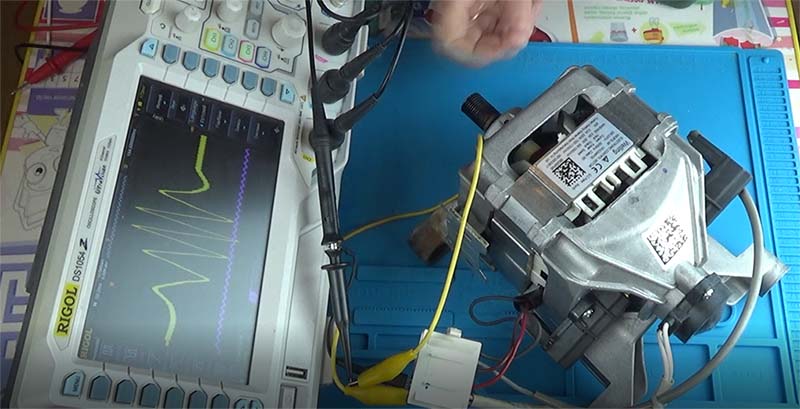
V nejjednodušším případě se jedná o reverzní motor – generátor střídavého napětí, jehož frekvence se úměrně mění v závislosti na rychlosti otáčení. Výsledek krátkého otočení hřídele rukou je viditelný na oscilogramu spořiče obrazovky. Mimochodem, mění se i amplituda, což vytváří problémy při zpracování signálu. Pokud chcete, nebudeme se do tohoto tématu pouštět, o mých pokusech s ním si můžete přečíst ve videu na odkazu na konci článku.
Připojíme motor k bloku
Tento článek je úvodní, k samotnému návrhu obvodu se dostaneme v příštím, ale zatím budeme používat obvody funkční nebo značně zjednodušené.
Níže je právě takový, obsahující rozebraný motor spojený s blokem pračky.
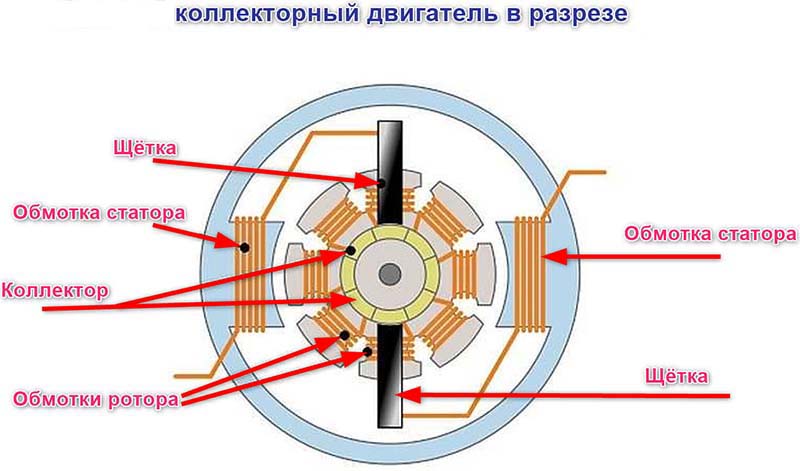
V každém daném okamžiku jsou v provozu zapojena dvě vinutí. Vinutí statoru je navinuto na kovové základně motoru. Vinutí rotoru s ním postupně interagují. Aby se rotor neustále otáčel, musí se tato vinutí postupně přepínat. To se děje díky sérii kontaktů připojených k rotujícímu hřídeli. Napětí se na ně přenáší přes kluzné kontakty, tzv. kartáčky.

Tento přístup má své klady i zápory. Na jednu stranu je motor všežravý – může pracovat na střídavý i stejnosměrný proud, na druhou stranu posuvné mechanické kontakty nejsou nejspolehlivější a takové motory nejsou vhodné pro zařízení s nepřetržitým cyklem, ale pro domácí spotřebiče, které jsou čas od času zapnuté, jako jsou pračky nebo šroubováky, postačí.
Co je za blokem?
Přidejme k našemu obvodu prvky umístěné mimo blok. Triak a relé.

Velmi stručně, doslova v kostce, popíšu její tvorbu. Obvod využívá až tři relé se spínacími kontakty. Dva z nich, K2 a K3, slouží ke změně směru toku proudu rotorem a v důsledku toho ke změně jeho směru otáčení. Relé K4 se instaluje pouze na pokročilé pračky s vysokými otáčkami motoru. Pracuje v tandemu se statorem, který je napojen na hlavní vinutí. Díky tomu můžete dále regulovat výkon, a tedy i rychlost otáček. Výše uvedený proces je podrobněji rozebrán v mém dalším videu.
Triak je zodpovědný za zapnutí motoru a nastavení jeho rychlosti otáčení.
Do hry vstupuje mikrokontrolér
Triak je samozřejmě řízen mikrokontrolérem. Pomocí zpětnovazebního a fázově-pulzního řízení zvládá nejen nastavit danou rychlost otáčení bubnu ve velmi širokém rozsahu, ale také ji udržet při stonásobné změně zatížení hřídele!

Je překvapivé, že i přes obrovské množství senzorů a aktuátorů pro řízení všech procesů probíhajících v pračce se nepoužívá pokročilý 32bitový ARM, ale skromný dříč – pomalý, levný 8 beatnik, který má několikrát méně RAM než Sinclair z konce osmdesátých let minulého století – nějaké 2, no, maximálně 4 kilobajty. Podle dnešních měřítek je to prostě NIC. O taktovací frekvenci 8 megahertzů, která je pro tak starého pána typická, ani nemluvím – dnes už jen těžko někoho napadne. Jeden počin má ale přece jen na kontě – co do počtu závěrů dokázal stonožku předčit!
Algoritmus práce
Pro regulaci rychlosti bubnu ji mikrokontrolér potřebuje alespoň určit. K tomu počítá počet otáček motoru za jednotku času pomocí otáčkoměru namontovaného na hřídeli.

Při pohledu na obrázek není těžké pochopit, že signál tachogenerátoru ve své čisté podobě je jako vstup zcela nevhodný a k jeho převedení do stravitelné formy prostě potřebujeme tvarovač pulsů. Na provoz a obvody této jednotky se podrobně podíváme příště, ale nyní vás žádám, abyste mi dali slovo, že díky tvarovači na vstupu mikrokontroléru jsou krásné pulzy se strmými hranami a bez náznaku se objeví odraz. Všechno by bylo v pořádku, ale nabízí se otázka: „Jak tak slabé a pomalé výpočetní jádro mikrokontroléru zvládá počítat pulzy spěchající impozantní rychlostí?
Pilný účetní dělá tento nudný úkol v mikrokontroléru. Pan Vatruba. No, žerty stranou, svou roli hraje vestavěný časovač. Časovač moderního mikrokontroléru je všestranný a počítání pulsů přijatých na jeho vstupu za jednotku času s následným uložením do speciálního registru je snad nejjednodušší operace, kterou je schopen. Hlavní je, že se vůbec nevyužívají prostředky výpočetního jádra. Mikrokontrolér jednoduše načte hodnotu z registru kdykoli jemu vyhovující, řekněme 50krát nebo pouze 10krát za sekundu a podle potřeby ji použije v dalších výpočtech.
Triakový regulátor

Omlouvám se, Habr nechává příliš málo místa pro užitečné informace, takže text na grafu není vidět. Na tomto a podobných obrázcích je třeba číst takto:
Vstupní napětí ze sítě
Řídící puls
Napětí zátěže
OK. Dostali jsme informaci o rychlosti otáčení a nyní změnou výkonu dodávaného do motoru můžeme regulovat jeho rychlost, a tedy i rychlost otáčení bubnu prádla. V moderních rozpočtových pračkách se to nejčastěji provádí metodou fázového pulzu a triak funguje jako výkonový prvek. Dodává napětí motoru ve formě impulsů, přísně synchronizovaných se začátkem každé půlvlny síťového napětí a danou dobou trvání. Značná setrvačnost rotující části motoru – rotoru a ještě větší setrvačnost těžkého bubnu s prádlem, dokonale vyhlazují impulzivní charakter točivého momentu. Port mikrokontroléru se chová jako velmi rychlý spínač, který dodává krátké negativní impulsy do řídicí elektrody triaku, což je na schématu označeno červenou šipkou.

To stačí k tomu, aby se v triaku rozjel lavinový proces a odpor mezi jeho silovými elektrodami klesl téměř na nulu. V důsledku toho, jak ukazuje spodní graf, se na vinutí motoru objeví napětí. Bude trvat, dokud vstup nezmizí.
V souladu se zvoleným mycím programem a jeho aktuálním stupněm obdrží mikrokontrolér příkaz k roztočení motoru na požadované otáčky a pro udržení otáček na požadované úrovni se spustí mechanismus pro dosažení a stabilizaci daného parametru, v tomto případě otáčky motoru, nazývané PID.

Ale vraťme se k našemu mikrokontroléru. K vytvoření krátkého pulzu s daným zpožděním od začátku půlcyklu používá svůj druhý časovač. K tomu časovač počítá i impulsy, ale ne z externího zdroje, ale z vnitřního oscilátoru samotného mikrokontroléru, jehož frekvence je stabilizována quartzovým rezonátorem.
Druhý časovač pracuje v tzv. PWM režimu – generuje krátký impuls pro zapnutí triaku s daným zpožděním vzhledem k okamžiku, kdy napětí překročí nulu. Trvání zpoždění se může měnit od nuly do jedné poloviny cyklu síťového napětí. Pro ruskou síť s frekvencí 50 Hz je tato hodnota 10 milisekund.
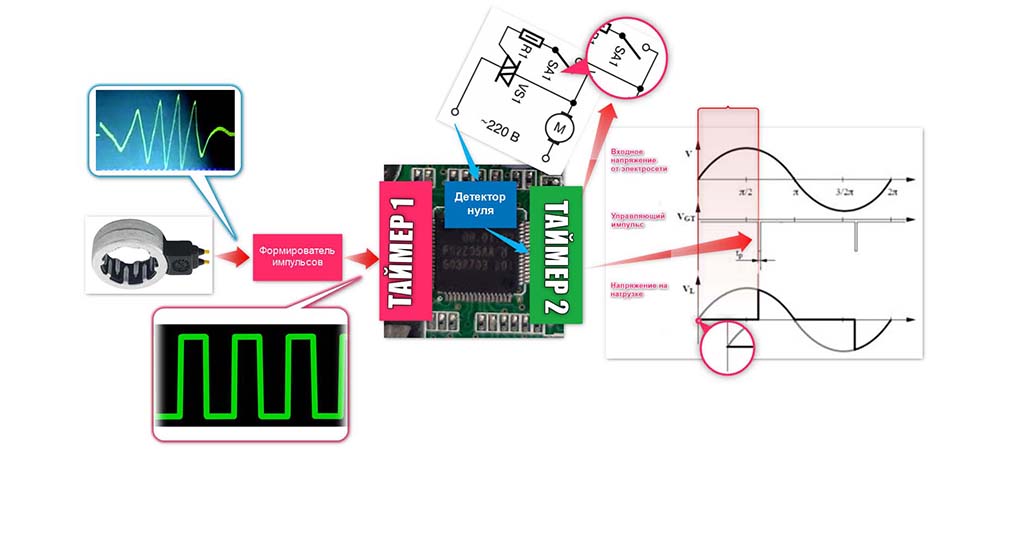
Pro přesné určení nulového napětí se používá speciální obvod, který se nazývá „detektor nuly“. Velmi zajímavé je i zapojení tohoto celku, podíváme-li se na něj příště, vzbudí-li téma mezi čtenáři zájem; Zatím jen poznamenám, že v okamžiku přechodu napájecího napětí z kladného do záporného se na výstupu detektoru objeví logická jednička a v tuto chvíli přechází do záporu, logická nula. A právě když se změní logická úroveň, spustí se časovač vpravo na obrázku. Počítá zadanou rychlost závěrky a vyšle krátký impuls do řídící elektrody triaku. Otevírá se a dodává napětí do motoru. Důležité! Triak se automaticky uzavře, když proud protékající obvodem dosáhne hodnoty blízké nule. Z tohoto důvodu je jeho použití ve většině případů omezeno na střídavé obvody. Takže navzdory skutečnosti, že náš motor je schopen pracovat na stejnosměrný proud, ve spojení s triakovým regulátorem se budeme muset omezit na střídavý proud.
Motor je bez energie a začíná nový provozní cyklus.
Stabilizace dané rychlosti otáčení
Zbývá zjistit to hlavní – jak funguje stabilizace. Řekněme, že se náš motor otáčí požadovanou frekvencí a najednou se zatížení hřídele snížilo. To se může stát například tehdy, když se během procesu odstřeďování sníží hmotnost prádla. V tomto případě se buben začne zrychlovat a v důsledku toho se zvýší frekvence otáčení tachogenerátoru a tím i impulsy přicházející od řidiče na vstupu časovače 1.

Když si toho mikrokontrolér všimne, zvýší zpoždění při dodávání řídicího impulsu do triaku. Triak se později otevře a do motoru bude dodáván menší výkon, jeho točivý moment se sníží a otáčky bubnu klesnou na hodnotu zadanou v programu a frekvence pulsů tachogenerátoru se vrátí do normálu. Dokládá to spodní graf obrázku. Ve spodním diagramu grafu plná červená barva ukazuje, o kolik se zkrátí doba přivedení napětí na motor. Výkon dodávaný do motoru klesne ještě vážněji – se změnou amplitudy se mění kvadraticky.

Není těžké si představit jinou situaci. Ve fázi oplachování ventil doléval do stroje vodu, zatížení hřídele se zvýšilo a pulzy vycházející z tvarovače snížily svou frekvenci.

V reakci na to mikrokontrolér zkrátí dobu trvání časovače T2. Triak se zapne dříve, což znamená, že zůstane otevřený DELŠÍ, a zvýší se výkon motoru. Rychlost se vrátí do normálu.

Na závěr podotýkám, že jsem popsal typický příklad zpětné vazby. Nepracuje okamžitě a rychlost se po několika iteracích ustálí, přičemž je možné spustit i malý oscilační proces, jehož amplituda při správném nastavení PID rychle klesá.
Odkazy na moje videa na základě materiálů, ze kterých byl článek připraven, pro ty, kteří se raději dívají, a rozlišení je vyšší
- řízení motoru
- průmyslová elektronika
- obvody pračky